6. Embedding and GPU acceleration¶
This tutorial demonstrates how to train an embedding network to extract informative features from observations and use these features for neural posterior estimation. Training and inference are performed on GPU.
import matplotlib.pyplot as plt
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
import zuko
from lampe.data import H5Dataset, JointLoader
from lampe.diagnostics import expected_coverage_mc
from lampe.inference import NPE, NPELoss
from lampe.plots import corner, coverage_plot, mark_point, nice_rc
from lampe.utils import GDStep
from tqdm import trange
6.1. Simulator¶
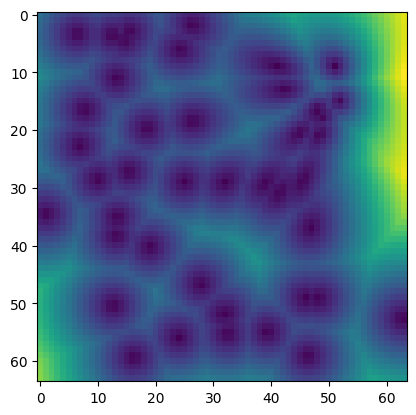
For this tutorial we use a simulator that procedurally generates distorted Worley noise images with respect to three parameters.
LABELS = [r'$\lambda$', r'$\sigma$', r'$p$']
LOWER = torch.tensor([10.0, 0.1, 1.0])
UPPER = torch.tensor([50.0, 0.5, 2.0])
prior = zuko.distributions.BoxUniform(LOWER, UPPER)
class WorleyNoise:
def __init__(self):
self.domain = torch.cartesian_prod(
torch.linspace(0, 1, 64),
torch.linspace(0, 1, 64),
)
def __call__(self, theta: torch.Tensor) -> torch.Tensor:
lmbda, sigma, p = theta
mu = torch.rand(2)
cores = torch.rand(np.random.poisson(lmbda), 2)
# Distortion
x = self.domain
x = x + torch.exp(-(x - mu).square().sum(dim=-1, keepdim=True) / sigma**2) * (x - mu)
# Cells
x = torch.cdist(x, cores, p=p)
x = torch.min(x, dim=-1).values
x = x / x.max()
return x.reshape(64, 64)
simulator = WorleyNoise()
theta = prior.sample()
x = simulator(theta)
print('theta:', theta.tolist())
print('x:')
plt.imshow(x)
plt.show()
theta: [41.51055145263672, 0.21925213932991028, 1.9552865028381348]
x:
6.2. Datasets¶
We store (on disk) \(2^{16}\) pairs \((\theta, x) \sim p(\theta, x)\) for training, \(2^{12}\) pairs for validation and \(2^{10}\) pairs for testing.
loader = JointLoader(prior, simulator, batch_size=2**4, vectorized=False)
H5Dataset.store(loader, 'train.h5', size=2**16, overwrite=True)
H5Dataset.store(loader, 'valid.h5', size=2**12, overwrite=True)
H5Dataset.store(loader, 'test.h5', size=2**10, overwrite=True)
trainset = H5Dataset('train.h5', batch_size=256, shuffle=True)
validset = H5Dataset('valid.h5', batch_size=256)
testset = H5Dataset('test.h5')
100%|██████████| 65536/65536 [05:57<00:00, 183.51pair/s]
100%|██████████| 4096/4096 [00:24<00:00, 167.55pair/s]
100%|██████████| 1024/1024 [00:05<00:00, 192.07pair/s]
It is usually recommended to preprocess the inputs of neural networks so that their mean and variance are close to zero and one, respectively. In our case, it is necessary to process the parameters \(\theta\) but not the observation \(x\).
def preprocess(theta: torch.Tensor) -> torch.Tensor:
return 2 * (theta - LOWER) / (UPPER - LOWER) - 1
def postprocess(theta: torch.Tensor) -> torch.Tensor:
return (theta + 1) / 2 * (UPPER - LOWER) + LOWER
6.3. Architecture¶
Because the observations are images, they cannot be fed directly to a NPE module, which only accepts vector-shaped observations. Instead, we rely on a convolutional neural network to extract a vector of informative features from the observation and feed this vector to the density estimator. In our case, the latter is a neural spline flow (NSF) with rational-quadratic splines borrowed from the zuko package. Additionally, the parameters are standardized to the \([-1, 1]\) interval, which improves convergence.
class ResBlock(nn.Sequential):
def __init__(self, features: int):
super().__init__(
nn.Conv2d(features, features, kernel_size=3, padding=1),
nn.ReLU(),
nn.Conv2d(features, features, kernel_size=3, padding=1),
)
def forward(self, x: torch.Tensor) -> torch.Tensor:
return x + super().forward(x)
class NPEWithEmbedding(nn.Module):
def __init__(self):
super().__init__()
self.npe = NPE(3, 8, build=zuko.flows.NSF, hidden_features=[128] * 3, activation=nn.ELU)
self.embedding = nn.Sequential(
nn.Unflatten(-2, (1, 64)),
nn.Conv2d(1, 16, kernel_size=3, padding=1),
ResBlock(16),
ResBlock(16),
nn.AvgPool2d(2, 2),
ResBlock(16),
ResBlock(16),
nn.AvgPool2d(2, 2),
ResBlock(16),
ResBlock(16),
nn.AvgPool2d(2, 2),
ResBlock(16),
ResBlock(16),
nn.AvgPool2d(2, 2),
nn.Flatten(-3),
nn.Linear(16 * 4 * 4, 8),
)
def forward(self, theta: torch.Tensor, x: torch.Tensor) -> torch.Tensor:
return self.npe(theta, self.embedding(x))
def flow(self, x: torch.Tensor): # -> Distribution
return self.npe.flow(self.embedding(x))
6.4. Training¶
Using an embedding with NPE does not impact the training routine. Here, we choose to monitor the loss of the estimator on a validation set distinct from the training set, which could help detect overfitting. The training is performed on GPU, requiring to transfer batches to GPU before each step.
estimator = NPEWithEmbedding().cuda()
loss = NPELoss(estimator)
optimizer = optim.Adam(estimator.parameters(), lr=1e-3)
step = GDStep(optimizer, clip=1.0)
for epoch in (bar := trange(32, unit='epoch')):
losses, val_losses = [], []
for theta, x in trainset:
losses.append(step(loss(preprocess(theta).cuda(), x.cuda())))
for theta, x in validset:
val_losses.append(loss(preprocess(theta).cuda(), x.cuda()))
bar.set_postfix(
loss=torch.stack(losses).mean().item(),
val_loss=torch.stack(val_losses).mean().item(),
)
100%|██████████| 32/32 [11:56<00:00, 22.38s/epoch, loss=-2.95, val_loss=-3.08]
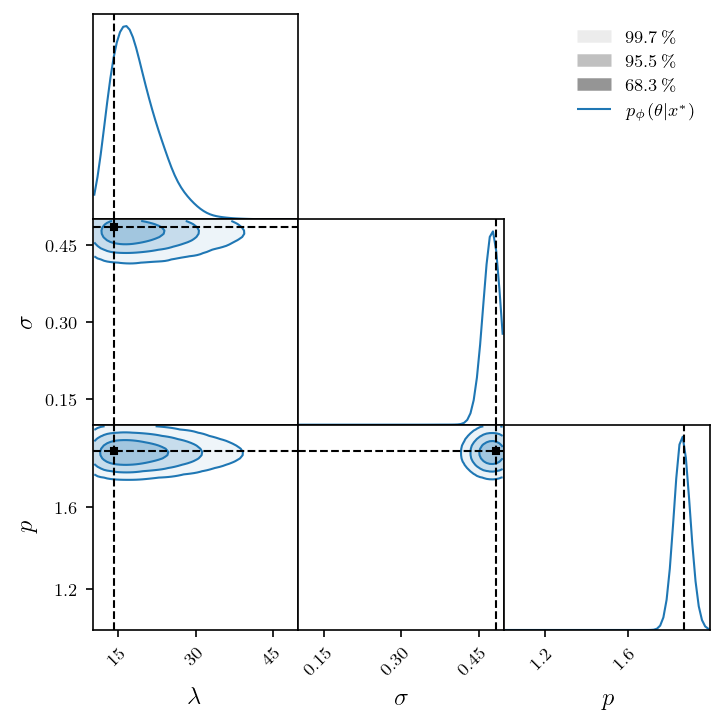
6.5. Inference¶
theta_star, x_star = testset[0]
with torch.no_grad():
samples = estimator.flow(x_star.cuda()).sample((2**16,)).cpu()
samples = postprocess(samples)
plt.rcParams.update(nice_rc(latex=True)) # nicer plot settings
fig = corner(
samples,
smooth=2,
domain=(LOWER, UPPER),
labels=LABELS,
legend=r'$p_\phi(\theta | x^*)$',
figsize=(4.8, 4.8),
)
mark_point(fig, theta_star)
6.6. Expected coverage¶
levels, coverages = expected_coverage_mc(
posterior=estimator.flow,
pairs=((preprocess(theta), x) for theta, x in testset),
device='cuda',
)
fig = coverage_plot(levels, coverages, legend='NPE')
1024pair [00:33, 30.72pair/s]
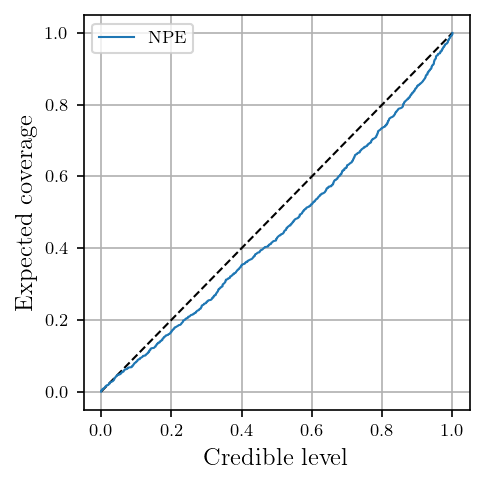
We notice that the estimator is slightly overconfident, meaning that the nominal parameters don’t fall in the predicted credible regions often enough. This problem could be mitigated with more training data.